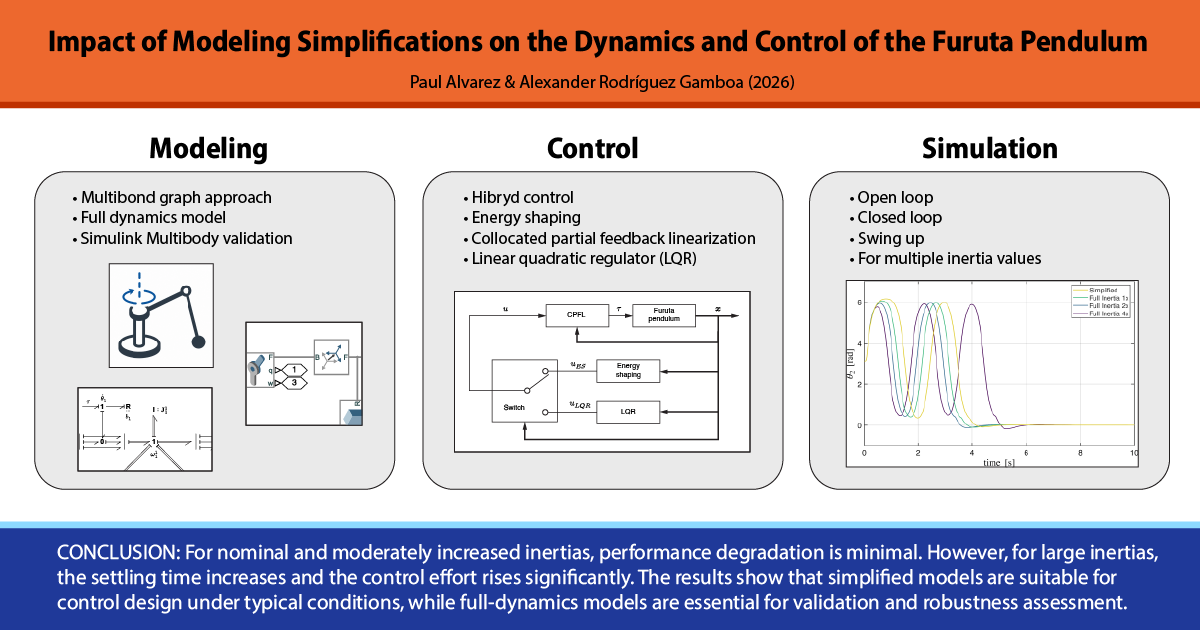
Impact of Modeling Simplifications on the Dynamics and Control of the Furuta Pendulum
DOI:
https://doi.org/10.59796/jcst.V16N3.2026.197Keywords:
furuta pendulum, rotary inverted pendulum, bond graph, multibond graph, energy shaping, linear-quadratic regulator (LQR)Abstract
This study analyzes the impact of modeling simplifications on the dynamics and control performance of the Furuta pendulum. A complete multibond graph model is developed, incorporating full system dynamics, and providing an energetically consistent and modular framework. The model is validated against a Simulink-Simscape reference, achieving a maximum normalized root mean squared error (NRMSE) of 0.2035 × 10–3. The commonly used simplified model, which neglects secondary inertias, is compared with full-dynamics models under open- and closed-loop conditions. Open-loop results show appreciable discrepancies, with NRMSE values increasing notably for both θ1 and θ2 as the inertias are progressively increased. A nonlinear control scheme based on energy shaping, collocated partial feedback linearization, and linear quadratic regulation (LQR) is designed using the simplified model. In closed loop, the controller achieves swing-up and stabilization in all cases within 10 seconds. For nominal and moderately increased inertias, performance degradation is minimal, with settling times around 7.4 s and control effort between 0.453 and 0.475 N2m2s. However, for large inertias, the settling time increases to 8.91 s, control effort rises to 0.655 N2m2s, and an additional oscillation is required. These results show that simplified models are suitable for control design under typical conditions, while full-dynamics models are essential for validation and robustness assessment.
References
Acosta, J. A. (2010). Furuta′ s pendulum: A conservative nonlinear model for theory and practise. Mathematical Problems in Engineering, 2010(1), Article 742894. https://doi.org/10.1155/2010/742894
Alvarez, P., & Avalos-Alvarez, E. F. (2025). Comprehensive modeling and LQR control of the double wheel on wheel system. Journal of Control, Automation and Electrical Systems, 36(1), 53-71. https://doi.org/10.1007/s40313-024-01139-0
Awtar, S., King, N., Allen, T., Bang, I., Hagan, M., Skidmore, D., & Craig, K. (2002). Inverted pendulum systems: Rotary and arm-driven-a mechatronic system design case study. Mechatronics, 12(2), 357-370. https://doi.org/10.1016/S0957-4158(01)00075-7
Borutzky, W. (2010). Bond graph methodology. London, UK: Springer. https://doi.org/10.1007/978-1-84882-882-7
Bos, A. M. (1986). Modelling multibody systems in terms of multibond graphs with application to a motorcycle. University of Twente.
Cazzolato, B. S., & Prime, Z. (2011). On the dynamics of the furuta pendulum. Journal of Control Science and Engineering, 2011(1), Article 528341. https://doi.org/10.1155/2011/528341
de Jesús Rubio, J. (2018). Discrete time control based in neural networks for pendulums. Applied Soft Computing, 68, 821-832. https://doi.org/10.1016/j.asoc.2017.04.056
Egeland, O., & Gravdahl, J. T. (2002). Modeling and simulation for automatic control. Trondheim, Norway: Marine Cybernetics. Retrieved from https://oe.folk.ntnu.no/Modeling%20and%20Simulation.pdf
Fantoni, I., & Lozano, R. (2002). Non-linear control for underactuated mechanical systems. London, UK: Springer Science & Business Media. https://doi.org/10.1007/978-1-4471-0177-2
Furuta, K., Yamakita, M., & Kobayashi, S. (1991). Swing up control of inverted pendulum [Conference presentation]. International Conference on Industrial Electronics, Control and Instrumentation, Kobe, Japan. https://doi.org/10.1109/IECON.1991.239008
Gonzalez-Avalos, G., Gallegos, N. B., Ayala-Jaimes, G., Garcia, A. P., Ferreyra García, L. F., & Rodríguez, A. J. P. (2023). Modeling and simulation of physical systems formed by bond graphs and multibond graphs. Symmetry, 15(12), Article 2170. https://doi.org/10.3390/sym15122170
Hamza, M. F., Yap, H. J., Choudhury, I. A., Isa, A. I., Zimit, A. Y., & Kumbasar, T. (2019). Current development on using Rotary Inverted Pendulum as a benchmark for testing linear and nonlinear control algorithms. Mechanical Systems and Signal Processing, 116, 347-369. https://doi.org/10.1016/j.ymssp.2018.06.054
Iwase, M., Astom, K. J., Furuta, K., & Akesson, J. (2006). Analysis of safe manual control by using Furuta pendulum [Conference presentation]. 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, Munich, Germany. https://doi.org/10.1109/CACSD-CCA-ISIC.2006.4776708
Karnopp, D. C., Margolis, D. L., & Rosenberg, R. C. (2012). System dynamics (5th ed.). New York, US: John Wiley & Sons.
Maini, A. K., & Vaz, A. (2020). Inverse Kinematics of a Spatial Mechanism using Multibond Graph. Computer Assisted Methods in Engineering and Science, 27(1), 71-85. https://doi.org/10.24423/cames.280
Moreno-Valenzuela, J., Aguilar-Avelar, C., Puga-Guzman, S. A., & Santibanez, V. (2016). Adaptive neural network control for the trajectory tracking of the Furuta pendulum. IEEE Transactions on Cybernetics, 46(12), 3439-3452. https://doi.org/10.1109/TCYB.2015.2509863
Ogata, K. (2010). Modern control engineering (5th ed.). Upper Saddle River, NJ, US: Prentice Hall.
Olfati-Saber, R. (1999). Fixed point controllers and stabilization of the cart-pole system and the rotating pendulum [Conference presentation]. Proceedings of the 38th IEEE Conference on Decision and Control (Cat. No. 99CH36304), Phoenix, AZ, US. https://doi.org/10.1109/CDC.1999.830086
Ramírez-Neria, M., Sira-Ramírez, H., Garrido-Moctezuma, R., & Luviano-Juarez, A. (2014). Linear active disturbance rejection control of underactuated systems: The case of the Furuta pendulum. ISA Transactions, 53(4), 920-928. https://doi.org/10.1016/j.isatra.2013.09.023
Rodríguez-Cortés, H. (2019). A swinging up controller for the furuta pendulum based on the total energy control system approach. Kybernetika, 55(2), 402-421. https://doi.org/10.14736/kyb-2019-2-0402
Spong, M. W., Hutchinson, S., & Vidyasagar, M. (2020). Robot modeling and control (Second edition). New York, US: John Wiley & Sons.
Tiernego, M. J. L., & Bos, A. M. (1985). Modelling the dynamics and kinematics of mechanical systems with multibond graphs. Journal of the Franklin Institute, 319(1-2), 37-50. https://doi.org/10.1016/0016-0032(85)90063-8
Turchetta, M., Krause, A., & Trimpe, S. (2020). Robust model-free reinforcement learning with multi-objective Bayesian optimization [Conference presentation]. 2020 IEEE international conference on robotics and automation (ICRA), Paris, France. https://doi.org/10.1109/ICRA40945.2020.9197000
Xin, X., & Liu, Y. (2014). Control design and analysis for underactuated robotic systems. London, UK: Springer. https://doi.org/10.1007/978-1-4471-6251-3
Yang, X., & Zheng, X. (2018). Swing-up and stabilization control design for an underactuated rotary inverted pendulum system: Theory and experiments. IEEE Transactions on Industrial Electronics, 65(9), 7229-7238. https://doi.org/10.1109/TIE.2018.2793214
Zabihifar, S. H., Yushchenko, A. S., & Navvabi, H. (2020). Robust control based on adaptive neural network for Rotary inverted pendulum with oscillation compensation. Neural Computing and Applications, 32(18), 14667-14679. https://doi.org/10.1007/s00521-020-04821-x
Downloads
Published
How to Cite
Issue
Section
Categories
License
Copyright (c) 2026 Journal of Current Science and Technology

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.