
ระบบตรวจจับยานพาหนะที่ละเมิดทางม้าลายด้วยการจอดรถผิดกฎหมาย
คำสำคัญ:
การตรวจจับทางม้าลาย, การตรวจจับยานพาหนะ, การติดตามตำแหน่งของวัตถุบทคัดย่อ
ความเป็นมาและวัตถุประสงค์ : การบังคับใช้กฎหมายอย่างจริงจังและมีประสิทธิภาพมีบทบาทสำคัญที่จะช่วยให้ผู้ขับขี่ตระหนักและรับผิดชอบต่อผู้คนบนท้องถนนมากขึ้น นำไปสู่การลดลงของอุบัติเหตุและความสูญเสียที่จะเกิดขึ้นต่อชีวิตและทรัพย์สิน งานวิจัยนี้จึงทำการพัฒนาระบบอัตโนมัติสำหรับตรวจจับยานพาหนะที่ทำผิดกฎจราจรบนทางม้าลาย โดยระบบจะตรวจจับยานพาหนะและนับจำนวนผู้ขับขี่ที่จอดพาหนะทับทางม้าลายในขณะที่รถจอดติดไฟแดง
วิธีดำเนินการวิจัย : ข้อมูลที่ใช้ในงานวิจัยเก็บจากกล้องวงจรปิดของเว็บไซต์สำนักการจราจรและขนส่งจำนวน 12 จุด รวมทั้งหมด 334 รูป ข้อมูลดังกล่าวถูกแบ่งออกเป็น 2 ส่วน ได้แก่ ข้อมูลสำหรับฝึกสอน 301 รูป และสำหรับทดสอบ 33 รูป เทคนิคที่ใช้คือ YOLOv5 เพื่อตรวจจับวัตถุ อันได้แก่ ยานพาหนะและทางม้าลาย นอกจากนี้ เพื่อให้การตรวจจับและการนับจำนวนเป็นไปอย่างถูกต้องในวิดีโอที่เป็นภาพต่อเนื่องจากกล้องวงจรปิด จึงใช้เทคนิคติดตามวัตถุในภาพ ได้แก่ วิธี DeepSORT และวิธี Manual ประกอบกันไปด้วย
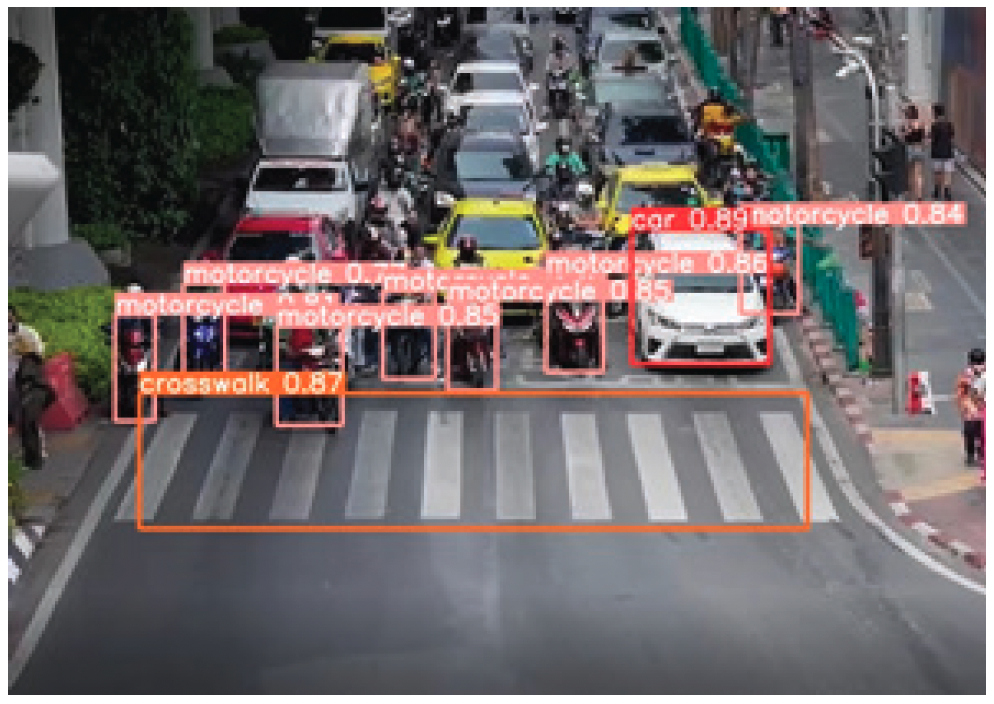
ผลการวิจัย : การใช้เทคนิค YOLOv5 เพื่อตรวจจับรถยนต์ รถจักรยานยนต์ และทางม้าลาย ได้ค่า Average Precision เท่ากับ 0.837 นอกจากนี้ ในส่วนของการติดตามวัตถุนั้น ผู้วิจัยพบว่าวิธี DeepSORT ให้ผลลัพธ์การติดตามวัตถุที่ถูกตรวจจับโดย YOLOv5 ดีกว่าวิธี Manual โดยสามารถติดตามและนับจำนวนยานพาหนะที่จอดทับทางม้าลายเกินกว่าระยะเวลาที่กำหนดได้อย่างมีประสิทธิภาพ
สรุป : งานวิจัยนี้เสนอการใช้ขั้นตอนวิธีอัตโนมัติในการวิเคราะห์ภาพต่อเนื่องจากวิดีโอกล้องวงจรปิดเพื่อตรวจจับยานพาหนะที่ทำผิดกฎจราจรโดยการจอดทับทางม้าลายระหว่างรถติดไฟแดง เทคนิคตรวจจับวัตถุ YOLOv5 สามารถตรวจจับยานพาหนะและทางม้าลายในภาพได้ดี แต่ยังจำเป็นต้องเสริมด้วยเทคนิคการติดตามวัตถุในภาพ เพื่อไม่ให้เกิดการตรวจจับพาหนะซ้ำซ้อนกันในภาพต่อเนื่องของกล้องวงจรปิด
การนำไปใช้ประโยชน์ในเชิงปฏิบัติ : ระบบที่นำเสนอในงานวิจัยนี้สามารถนำไปต่อยอดเพื่อตรวจจับผู้ขับขี่ที่จอดพาหนะทับทางม้าลายในขณะที่รถจอดติดไฟแดงได้โดยอัตโนมัติ ทั้งนี้ อาศัยข้อมูลภาพจากกล้องวงจรปิดที่มีการติดตั้งอยู่แล้วและเพิ่มเติมขั้นตอนวิธีการวิเคราะห์ภาพเสริมเข้าไปเท่านั้น
References
ThaiRoads Foundation, 2019, Key Facts on Road Safety Situations in Thailand 2016-2017 [Online], Available: http://trso.thairoads.org/system/files/rs_book_59-60_final_resize_0.pdf. [1 June 2022] (In Thai)
Department of Disease Control, 2022, Pedestrians and the Crosswalk Safety [Online], Available: https://ddc.moph.go.th/dip/news.php?news=23028&deptcode=dip. [1 June 2022] (In Thai)
National Police Agency, “Pedestrians First at Road Crossings,” National Police Agency [Online], Available: https://www.npa.go.jp/english/bureau/traffic/document/06_PedestriansFirstatRoadCrossings.pdf. [11 March 2024]
Bangkok Biz News, 2022, Bangkok Raises ‘Asoke Montri Intersection’ as a Safe Crosswalk after using AI Cameras to Catch and Penalize Offenders [Online], Available: https://www.bangkokbiznews.com/news/984596. [1 June 2022] (In Thai)
Ibadov, S., Ibadov, R., Kalmukov, B. and Krutov, V., 2017, “Algorithm for Detecting Violations of Traffic Rules based on Computer Vision Approaches,” MATEC Web of Conferences, 132 (05005), 4 p. https://doi.org/10.1051/matecconf/201713205005
Zhang, Z.D., Tan, M.L., Lan, Z.C., Liu, H.C, Pei, L. and Yu, W.X., 2022, “CDNet: A Real-time and Robust Crosswalk Detection Network on Jetson Nano based on YOLOv5,” Neural Computing and Applications, 34 (13), pp. 10719-10730.
Malbog, M.A., 2019, “MASK R-CNN for Pedestrian Crosswalk Detection and Instance Segmentation,” IEEE International Conference on Engineering Technologies and Applied Sciences (ICETAS), 20-21 December 2019, Kuala Lumpur, Malaysia, pp. 1-5.
Romić, K., Galić, I., Leventić, H. and Habijan, M., 2021, “Pedestrian Crosswalk Detection Using a Column and Row Structure Analysis in Assistance Systems for the Visually Impaired,” Acta Polytechnica Hungarica, 18 (7), pp. 25-45.
Tonge, A., Chandak, S., Khiste, R., Khan, U. and Bewoor, L.A., 2020, “Traffic Rules Violation Detection using Deep Learning,” International Conference on Electronics, Communication and Aerospace Technology (ICECA), 5-7 November 2020, Coimbatore, India, pp. 1250-1257.
Ibadov, S.R., Kalmykov, B.Y., Ibadov, R.R. and Sizyakin, R.A., 2019, “Method of Automated Detection of Traffic Violation with a Convolutional Neural Network,” EPJ Web of Conferences, 224 (04004), 7 p. https://doi.org/10.1051/epjconf/201922404004
Prasanthi, K., Chowdhary, S.V., Prasanthi, T.L. and Neelima, N., 2022, “Analysis on Applications of Machine Learning Based Image Processing for Vehicle Detection and Counting System,” International Journal of Mechanical Engineering, 7 (1), 5 p.
Navastara, D.A., Maulana, M.F., Suciati, N. and Sarena, S.T., 2021, “Vehicle Classification Based on CCTV Video Recording Using Histogram of Oriented Gradients, Local Binary Patterns, and Hierarchical Multi-SVM,” IOP Conference Series: Materials Science and Engineering, 1077 (1), 012068. https://doi.org/10.1088/1757-899X/1077/1/012068
Pan, S. and Wang, S., 2021, “Identifying Vehicles Dynamically on Freeway CCTV Images through the YOLO Deep Learning Model,” Sensors and Materials, 33 (5), pp. 1517–1530.
Zhu, M., Zhang, S., Zhong, Y., Lu, P., Peng, H. and Lenneman, J.K., 2021, “Monocular 3D Vehicle Detection Using Uncalibrated Traffic Cameras through Homography,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 27 September– 1 October 2021, Prague, Czech Republic, pp. 3814-3821.
Shepelev, V., Aliukov, S., Glushkov, A. and Shabiev, S., 2020, “Identification of Distinguishing Characteristics of Intersections based on Statistical Analysis and Data from Video Cameras,” Journal of Big Data, 7 (46), 23 p. https://doi.org/10.1186/s40537-020-00324-7
Hou, X., Wang, Y. and Chau, L., 2019, “Vehicle Tracking Using Deep SORT with Low Confidence Track Filtering,” IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), 18-21 September 2019, Taipei, Taiwan, pp. 1-6.
Parico, A.I.B. and Ahamed, T., 2021, “Real Time Pear Fruit Detection and Counting Using YOLOv4 Models and Deep SORT,” Sensors, 21 (14), 32 p. https://doi.org/10.3390/s21144803
Santos, A.M., Bastos-Filho, C.J.A., Maciel, A.M.A. and Lima, E., 2020, “Counting Vehicle with High-Precision in Brazilian Roads Using YOLOv3 and Deep SORT,” SIBGRAPI Conference on Graphics, Patterns and Images (SIBGRAPI), 7-10 November 2020, Porto de Galinhas, Brazil, pp. 69-76.
Wojke, N., Bewley, A. and Paulus, D., 2017, “Simple Online and Realtime Tracking with a Deep Association Metric,” IEEE International Conference on Image Processing (ICIP), 17-20 September 2017, Beijing, China, pp. 3645-3649.
Lafon, M. and Thomas, A., 2024, “Understanding the Double Descent Phenomenon in Deep Learning,” arXiv, 2403 (10459), 21 p. https://doi.org/10.48550/arXiv.2403.10459
Downloads
เผยแพร่แล้ว
How to Cite
ฉบับ
บท
License
Copyright (c) 2024 มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
เนื้อหาของบทความที่ตีพิมพ์ในวารสาร Science and Engineering Connect ในทุกรูปแบบ รวมถึงข้อความ สมการ สูตร ตาราง ภาพ ตลอดจนภาพประกอบในรูปแบบอื่นใด เป็นลิขสิทธิ์ของมหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี การนำเนื้อหา ไม่ว่าจะในรูปแบบใด ของบทความไปใช้ประโยชน์ในเชิงพาณิชย์ ต้องได้รับอนุญาตจากบรรณาธิการวารสารอย่างเป็นลายลักษณ์อักษรก่อนเท่านั้น
