
Detection System for Vehicles Violating Pedestrian Crosswalks through Illegal Parking
Keywords:
Crosswalk Detection, Vehicle Detection, Object TrackingAbstract
Background and Objectives: Strict and effective enforcement of laws plays a crucial role in increasing driver awareness and responsibility towards people on the roads. This could in turn lead to a reduction in accidents and losses to life and properties. The present research therefore developed an automated system for detecting vehicles violating traffic rules on pedestrian crosswalks. The system detects vehicles and counts the number of drivers parking their vehicles on pedestrian crosswalks while waiting at red lights.
Methodology: Data for the study were collected from 12 surveillance camera sites of the Department of Traffic and Transportation, totaling 334 images. The data were divided into two parts: training data consisting of 301 images and testing data of 33 images. The YOLOv5 technique was employed to detect such objects as vehicles and pedestrian crosswalks. Additionally, to ensure accurate detection and counting in continuous video images from surveillance cameras, two alternatives viz. DeepSORT object tracking and manual methods were experimented.
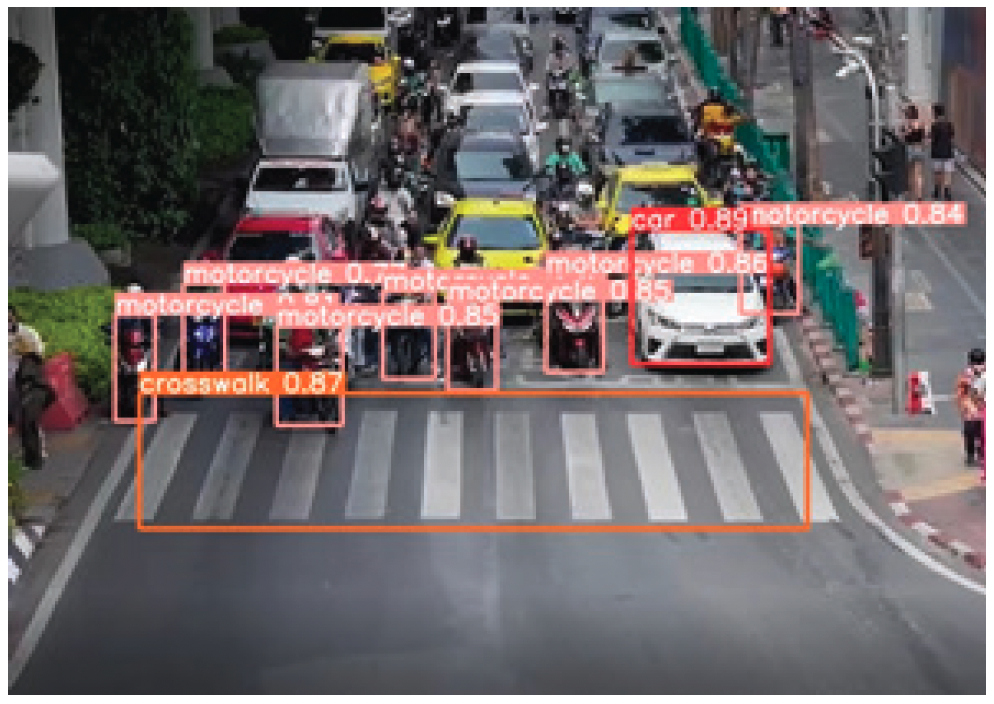
Main Results: Using the YOLOv5 technique to detect cars, motorcycles, and pedestrian crosswalks resulted in an Average Precision score of 0.837. In terms of object tracking, the DeepSORT method outperformed the manual method in effectively tracking and counting vehicles parked over pedestrian crosswalks beyond the designated time frame.
Conclusions: The present research proposes the use of automated vision analysis from continuous video surveillance to detect vehicles violating traffic laws by parking over pedestrian crosswalks while waiting at red lights. The study reveals that while the YOLOv5 technique effectively detects vehicles and pedestrian crosswalks in images, it requires an additional object tracking technique to prevent duplicate vehicle detection in continuous camera images.
Practical Application: The system investigated in the present research can be further developed to automatically detect drivers parking over pedestrian crosswalks while waiting at red lights. This can be accomplished using existing surveillance camera image data, with simple addition of an enhanced image analysis technique.
References
ThaiRoads Foundation, 2019, Key Facts on Road Safety Situations in Thailand 2016-2017 [Online], Available: http://trso.thairoads.org/system/files/rs_book_59-60_final_resize_0.pdf. [1 June 2022] (In Thai)
Department of Disease Control, 2022, Pedestrians and the Crosswalk Safety [Online], Available: https://ddc.moph.go.th/dip/news.php?news=23028&deptcode=dip. [1 June 2022] (In Thai)
National Police Agency, “Pedestrians First at Road Crossings,” National Police Agency [Online], Available: https://www.npa.go.jp/english/bureau/traffic/document/06_PedestriansFirstatRoadCrossings.pdf. [11 March 2024]
Bangkok Biz News, 2022, Bangkok Raises ‘Asoke Montri Intersection’ as a Safe Crosswalk after using AI Cameras to Catch and Penalize Offenders [Online], Available: https://www.bangkokbiznews.com/news/984596. [1 June 2022] (In Thai)
Ibadov, S., Ibadov, R., Kalmukov, B. and Krutov, V., 2017, “Algorithm for Detecting Violations of Traffic Rules based on Computer Vision Approaches,” MATEC Web of Conferences, 132 (05005), 4 p. https://doi.org/10.1051/matecconf/201713205005
Zhang, Z.D., Tan, M.L., Lan, Z.C., Liu, H.C, Pei, L. and Yu, W.X., 2022, “CDNet: A Real-time and Robust Crosswalk Detection Network on Jetson Nano based on YOLOv5,” Neural Computing and Applications, 34 (13), pp. 10719-10730.
Malbog, M.A., 2019, “MASK R-CNN for Pedestrian Crosswalk Detection and Instance Segmentation,” IEEE International Conference on Engineering Technologies and Applied Sciences (ICETAS), 20-21 December 2019, Kuala Lumpur, Malaysia, pp. 1-5.
Romić, K., Galić, I., Leventić, H. and Habijan, M., 2021, “Pedestrian Crosswalk Detection Using a Column and Row Structure Analysis in Assistance Systems for the Visually Impaired,” Acta Polytechnica Hungarica, 18 (7), pp. 25-45.
Tonge, A., Chandak, S., Khiste, R., Khan, U. and Bewoor, L.A., 2020, “Traffic Rules Violation Detection using Deep Learning,” International Conference on Electronics, Communication and Aerospace Technology (ICECA), 5-7 November 2020, Coimbatore, India, pp. 1250-1257.
Ibadov, S.R., Kalmykov, B.Y., Ibadov, R.R. and Sizyakin, R.A., 2019, “Method of Automated Detection of Traffic Violation with a Convolutional Neural Network,” EPJ Web of Conferences, 224 (04004), 7 p. https://doi.org/10.1051/epjconf/201922404004
Prasanthi, K., Chowdhary, S.V., Prasanthi, T.L. and Neelima, N., 2022, “Analysis on Applications of Machine Learning Based Image Processing for Vehicle Detection and Counting System,” International Journal of Mechanical Engineering, 7 (1), 5 p.
Navastara, D.A., Maulana, M.F., Suciati, N. and Sarena, S.T., 2021, “Vehicle Classification Based on CCTV Video Recording Using Histogram of Oriented Gradients, Local Binary Patterns, and Hierarchical Multi-SVM,” IOP Conference Series: Materials Science and Engineering, 1077 (1), 012068. https://doi.org/10.1088/1757-899X/1077/1/012068
Pan, S. and Wang, S., 2021, “Identifying Vehicles Dynamically on Freeway CCTV Images through the YOLO Deep Learning Model,” Sensors and Materials, 33 (5), pp. 1517–1530.
Zhu, M., Zhang, S., Zhong, Y., Lu, P., Peng, H. and Lenneman, J.K., 2021, “Monocular 3D Vehicle Detection Using Uncalibrated Traffic Cameras through Homography,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 27 September– 1 October 2021, Prague, Czech Republic, pp. 3814-3821.
Shepelev, V., Aliukov, S., Glushkov, A. and Shabiev, S., 2020, “Identification of Distinguishing Characteristics of Intersections based on Statistical Analysis and Data from Video Cameras,” Journal of Big Data, 7 (46), 23 p. https://doi.org/10.1186/s40537-020-00324-7
Hou, X., Wang, Y. and Chau, L., 2019, “Vehicle Tracking Using Deep SORT with Low Confidence Track Filtering,” IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), 18-21 September 2019, Taipei, Taiwan, pp. 1-6.
Parico, A.I.B. and Ahamed, T., 2021, “Real Time Pear Fruit Detection and Counting Using YOLOv4 Models and Deep SORT,” Sensors, 21 (14), 32 p. https://doi.org/10.3390/s21144803
Santos, A.M., Bastos-Filho, C.J.A., Maciel, A.M.A. and Lima, E., 2020, “Counting Vehicle with High-Precision in Brazilian Roads Using YOLOv3 and Deep SORT,” SIBGRAPI Conference on Graphics, Patterns and Images (SIBGRAPI), 7-10 November 2020, Porto de Galinhas, Brazil, pp. 69-76.
Wojke, N., Bewley, A. and Paulus, D., 2017, “Simple Online and Realtime Tracking with a Deep Association Metric,” IEEE International Conference on Image Processing (ICIP), 17-20 September 2017, Beijing, China, pp. 3645-3649.
Lafon, M. and Thomas, A., 2024, “Understanding the Double Descent Phenomenon in Deep Learning,” arXiv, 2403 (10459), 21 p. https://doi.org/10.48550/arXiv.2403.10459
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2024 King Mongkut's University of Technology Thonburi

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
Any form of contents contained in an article published in Science and Engineering Connect, including text, equations, formula, tables, figures and other forms of illustrations are copyrights of King Mongkut's University of Technology Thonburi. Reproduction of these contents in any format for commercial purpose requires a prior written consent of the Editor of the Journal.

